3 绝对圆锥曲线
在进一步了解相机标定前,有必要了解绝对圆锥曲线(Absolute )这一概念。
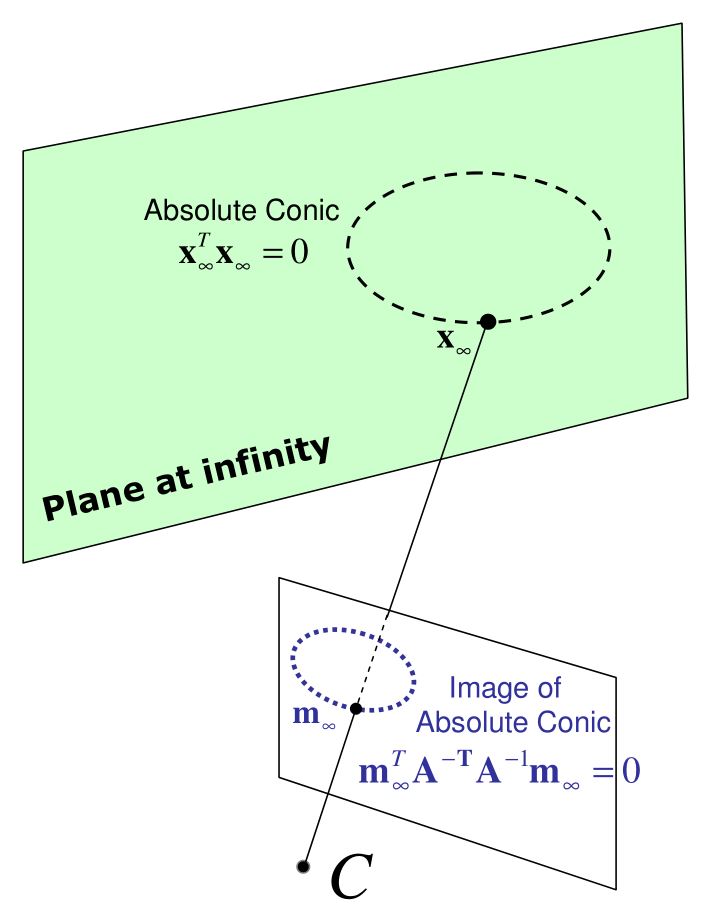
对于一个3D空间的点x,其投影空间的坐标为:x~=[x1,x2,x3,x4]T。我们定义无穷远处的平面用符号Π∞表示,该平面内的投影空间点坐标满足x4=0,则位于圆锥曲线Ω上的点满足:
令x∞=[x1,x2,x3]T是绝对圆锥曲线Ω上的点,如上图所示。由定义可知xT∞x∞=0,同时也有x~∞=[x1,x2,x3,0]T满足x~T∞x~∞=0。读至此处,我们发现不管是Π∞和Ω,还是x∞和x~∞都是存粹想象出来的,很难在实际生活里找到实例,但是科学就是这么迷人,给定一个起始点,想象和求知探索的渴求却不受其限制,直至永无止境。
让我们再看公式(1),如果我们令:x=x1/x3,y=x2/x3,显而易见,位于曲线Ω上的点方程就可以写成:x2+y2=−1,这就是一个圆方程,只不过我们所想象出来的这个虚拟圆的半径为−1−−−√,当然对于了解复数()概念的我们,这并没什么不可。
此时,或许我们会困惑,为什么要费尽心机想象出绝对圆锥曲线呢?原因在于绝对圆锥曲线所具有的一条重要特性:对于刚体变换具有不变性,这么说是不是有点不明觉厉,那就继续往下看。
首先简单讲一下刚体变换:只有物体的位置(平移变换)和朝向(旋转变换)发生改变,而形状不变,得到的变换称为刚体变换。以三维刚体变换为例:
或者表述为:
令H=[R0t1],对于位于绝对圆锥曲线Ω上的点x~∞=[x∞0],刚体变换后的点x~′∞可表示为:
则x′∞很明显也是位于无穷远平面上的点,而且是位于同一绝对圆锥曲线Ω上点:
令绝对圆锥曲线Ω对应的图像称为ω,也被简记为IAC(Image of the absolute conic),当然这也是想象出来的~于是对于Ω上的任一点x∞,其像点m∞满足:
因此,绝对圆锥曲线成像构成一个虚构曲线,并且由公式(7)可以看出,这个虚拟曲线由A−TA−1决定,这与相机的外参完全无关,而仅仅由相机内参决定。可以设想,如果我们找到了绝对圆锥曲线通过相机所成的图像,那就可以求解出相机内参。至此,我想大家也就明白为什么会提出Absolute Conic这一概念了吧。事实上,这一理论在相机自检校标定法(Self-calibration)中作为基础理论,十分重要。
后续文章将会为大家介绍几种确定绝对圆锥曲线Ω对应的图像ω的方法。